When we accepted the challenge of designing a gravity racer we were inundated with offers of help: tips on what we should do, recommendations for which parts we should be using etc. It seemed that nearly everyone we spoke to was an expert! While some of their advice was gratefully received we decided to spend a bit of time going back to basics and develop our own understanding of the science behind gravity racing*.
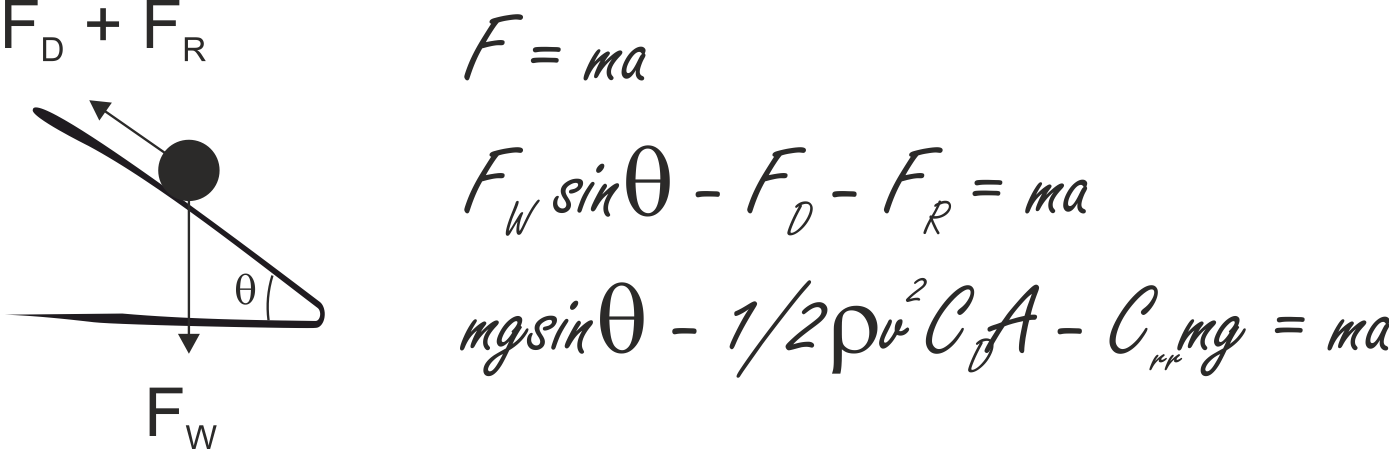
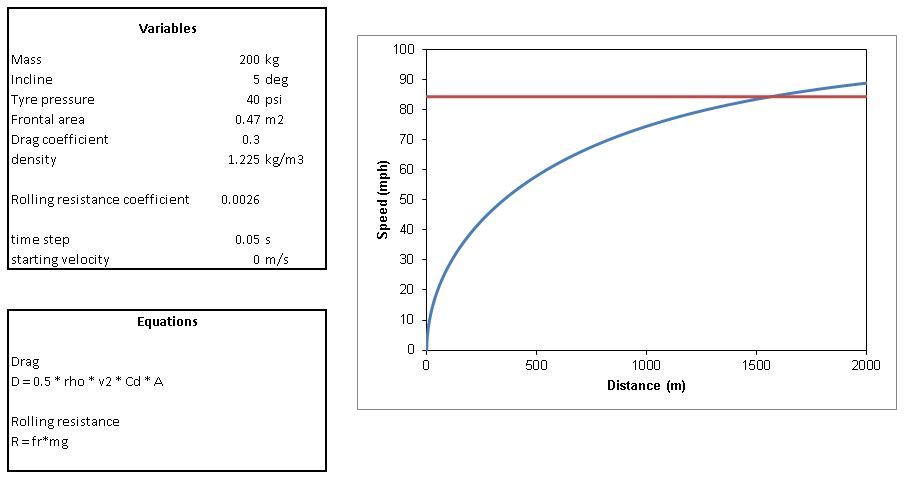
Similar to the sled project, we started with a simple Newtonian model: the forces acting against us were rolling resistance and aerodynamic drag, the only one in our favour was gravity. What could we do to reduce the retarding forces and could we find a venue to help us make the most of gravity?
ROLLING RESISTANCE
Rolling resistance (FR) is a measure of the force required to overcome the friction between the tyres and the road surface and is influenced by a number of different factors, the main ones being: pressure, temperature, road surface, wheel diameter and tyre width. Generally the combined effect of these are grouped into what is known as the coefficient of rolling resistance (Crr) but it was useful for us to know the influence that each one may have. I’ve outlined a couple of the more interesting effects.
Weight: As you can see from the equation, rolling resistance increases with the mass of the racer (m = mass of Guy + mass of racer). However, as the Newtonian model showed, the force due to gravity is our only means of propulsion and has a much greater effect than the loss due to rolling resistance. For our gravity racer it was therefore going to be helpful if we could increase the weight and to try and reduce the rolling resistance in other ways.
Pressure: It is often assumed that the higher the tyre pressure, the lower the rolling resistance. This is generally true − a tyre at higher pressure deforms less (resulting in a smaller contact patch between the tyre and the road) and less is energy lost to deformation. There are however, some circumstances where there can be too much pressure. Take for example, a typical UK road. During your commute to work you are likely to ride across numerous pot holes, manhole covers and loose gravel. During each encounter some of your forward momentum will be used to overcome the obstacle as the bikes trajectory is altered. However, if your tyre pressure is slightly lower, the tyre is able to deform around the obstacle, leaving the trajectory of the bike unaltered and preserving your forward momentum. It is more efficient to deform the tyre than it is to move the whole bike. And so, for every given wheel and road surface combination, there is a sweet spot of optimum pressure.
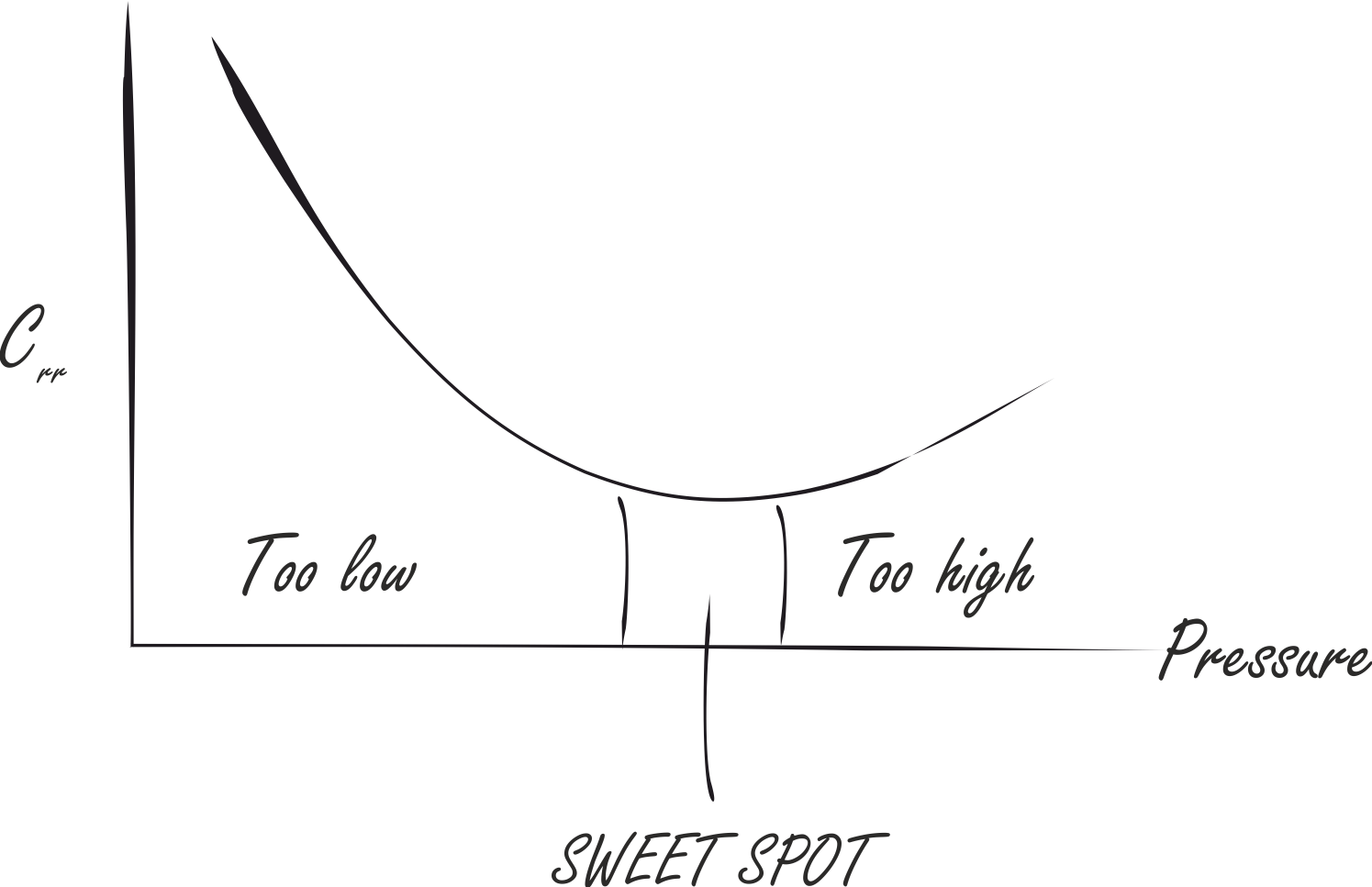
This was important to us as although we could follow recommendations of tyre pressure in the region of 70-90 psi, it meant that we would need to tune this ourselves when we were at the run location.
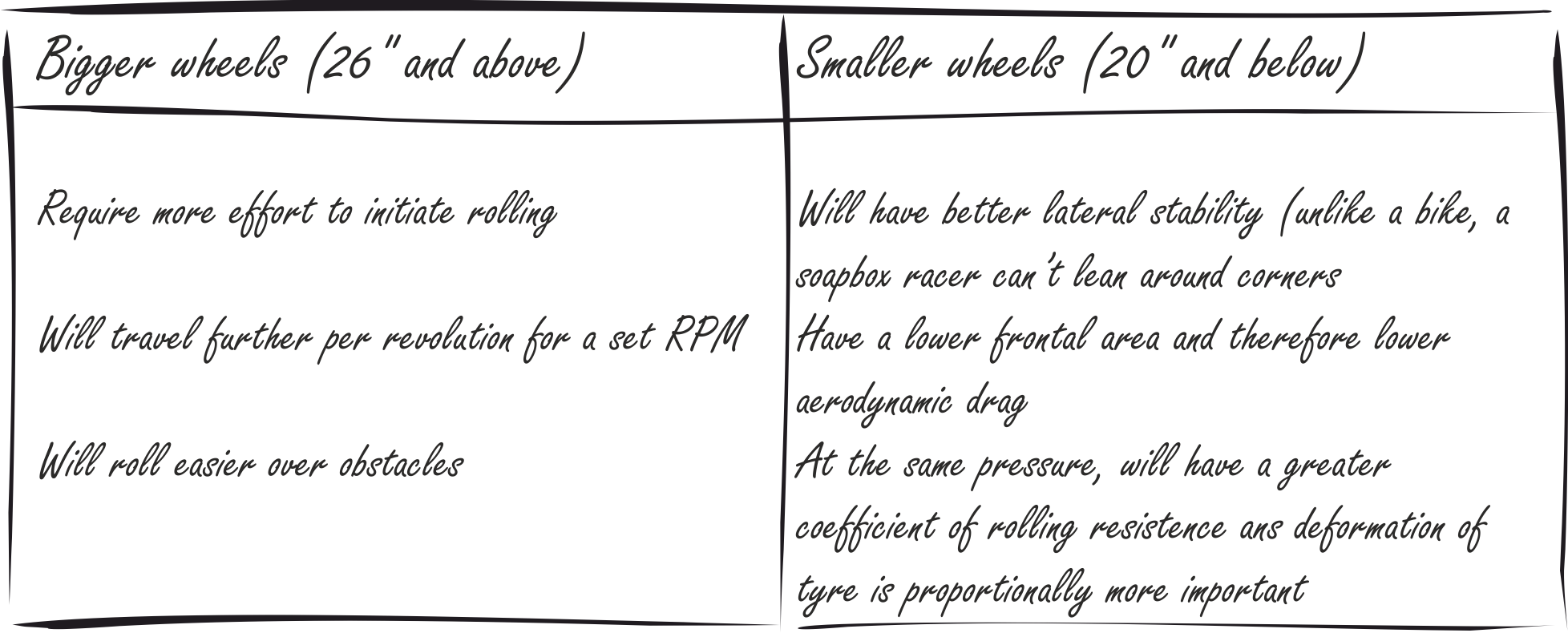
Wheel size: There are pros and cons to big and little wheels…
AERODYNAMICS
The blog article to follow on design will describe the methods we used to lower the aerodynamic drag in more detail. There are three main variables that we needed to consider to lower the influence of aerodynamic drag: frontal area A, air density r, and the drag coefficient CD. A small frontal area was going to be necessary to reduce drag and we needed to carefully design the shell to optimise the drag coefficient. The air density is dependent on temperature and pressure. Higher temperatures results in a lower air density whilst higher pressures increases the density. Pressure decreases with altitude so in theory, a warm mountainous region would be perfect (more details to follow on location)!
BRAKING
Whilst not a factor in the initial Newtonian model, Guinness World Records stipulated that the racer must come to a controlled stop, and as such it was important that we had an understanding on how best to brake** the racer.
We were very lucky to work with Hope Technology on our brake selection. Hope’s brake expert, Guillaume Léon informed us that they are able to test their disc brakes up to a braking torque of 150 Nm. Although it was possible that the brakes would be able to withstand higher torque values it gave us a baseline to work from. Working with Guillaume we were able to estimate the braking distance required to come to a controlled stop from 85 mph.
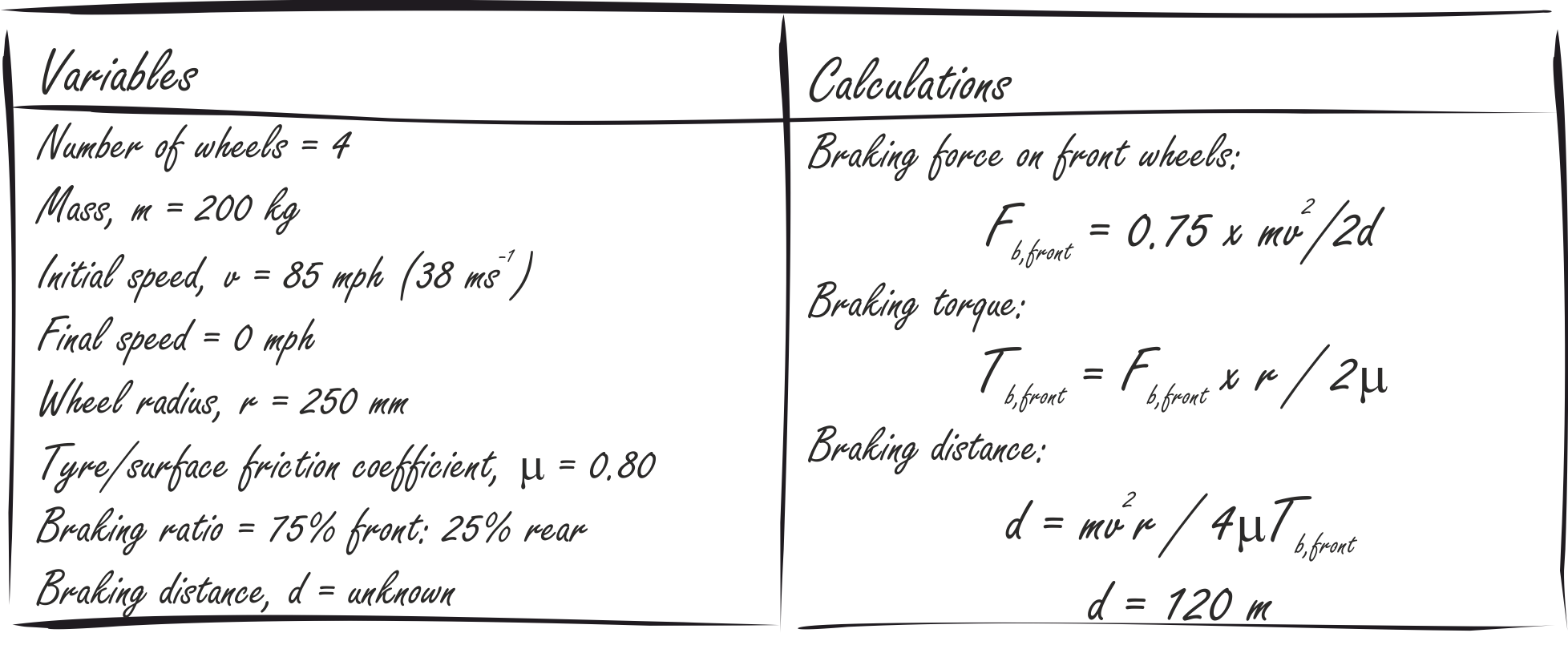
This value of 120 m could then be factored into our Newtonian model to indicate how much of the run would be lost to braking distance. Part of the Guinness Record requirement was also that the speed had to be taken as an average over 100 m. Factoring in a 120 m braking distance allowed us to estimate where the speed gates needed to be positioned.
BACK TO THE MODEL
Initially the model was used to highlight the parameters we needed to optimise to maximise our chances of getting the world record. As the design and build of the gravity racer progressed we were able to update our model and use it to estimate whether or not certain run locations had sufficient incline and length to generate the speeds necessary to reach 85 mph.
COMING UP
The next blog post will go into more detail on the design of our gravity racer and hopefully answer some of your question regarding the choices we made.
*this blog does not intend to cover every scientific aspect behind gravity racing but instead we have highlighted some of the concepts we thought were most interesting (and we also acknowledge approximations have been made).
**not break… Guy gave us a nice demonstration on how that could be done.

Well, one way of course is, as was quoted on the Channel 4 broadcast, by âovercoming inertiaâ.
That way a gravity racer will be able to accelerate without the application of any more force . . . 😉
Edward M Winter BEd MSc PhD DSc CSci FBASES FafPE
Professor of the Physiology of Exercise
[Description: Description: CSES_Logo_215_229_300dpi.jpg]
Academy of Sport and Physical Activity
Sheffield Hallam University
A122, Collegiate Hall,
Collegiate Crescent,
Sheffield S10 2BP
Telephone +44 (0)114 225 4333
email: e.m.winter@shu.ac.uk
Skype: edward.winter2
http://www.shu.ac.uk/research/cses/
LikeLike
A fair comment, I believe Channel 4 are using the quote to make the link as to why we needed a push start. We used the following definition of inertia:
“The property by which matter remains in a state of rest or continuous velocity unless acted on by an external force.”
However, it’s a concept that is not easily explained (as shown by Guy’s confusion before the lorry pull!); what we were attempting to describe was that it would be harder for Guy to pull the lorry from stationary (requiring acceleration) than it would be to keep it moving once up to speed (not requiring acceleration). And in reference to the racer, if the top of the run had been flat, the racer would have remained stationary without the external force provided by our push-start; hence the ‘improper’ statement: we needed to ‘overcome inertia’ to accelerate the racer.
As it happened, the start of the run was sufficiently inclined that the racer could roll into the first corner without the need of a push-start. However, it was great to meet Gemma Magnusson and the GB Bobsleigh women…and it made good TV 🙂
LikeLike
Also check out Bicycle Quarterly for some excellent reviews on tyre performance:
http://janheine.wordpress.com/2012/06/13/bicycle-quarterly-performance-of-tires/
LikeLike
You mention in the “pros and cons” that bigger wheels take “more effort to initiate rolling”. Was there a reason why you didn’t also include the moment of inertia of the wheels in your newtonian model?
LikeLike
Excellent content you post here! You can earn some
extra money from your page, don’t miss this opportunity, for more
info simply type in google – omgerido monetize website
LikeLike